Twin Otter mit Fahrwerk...

Die Schwimmer an der Twin Otter verleihen der Maschine zwar eine gewisse Ehrwürdigkeit, jedoch kommt sie bei mir dadurch nicht so oft zum Einsatz denn die Möglichkeit, offiziell Wasserflug zu betreiben, ist doch sehr eingeschränkt, wenn nicht unmöglich. Daher habe ich beschlossen, sie im Auslieferungszustand zu betreiben und mit dem Radfahrwerk auszustatten.

Eines war schon seinerzeit beim Auspacken bzw. Öffnen des Kartons klar: Das Aussehen mit dem abgebildeten Fahrwerk sieht „ausbau-fähig“ aus. Hier besteht Handlungsbedarf!
Sowohl in der Canada-Ausführung als auch in der Schweizer Ausführung ist das Fahrwerk viel zu hoch und entspricht in keinster Weise dem Original.
Vergleicht man es mit dem Original, sie liegt sie wesentlich tiefer
und wirkt dadurch gedungener und satter am Boden.
Dies habe ich
auch zum Anlass genommen, hier ein wenig nachzuhelfen.
Begonnen wurde damit, die Befestigung am Bugspannt zu verstärken
denn die bestehende Konstruktion sah zwar Löcher vor aber:
1.)
War das bestehende und mitgelieferte Bugfahrwerk viel zu lang bzw. zu hoch und
2.)
Sah die Befestigung nicht sehr vertrauenserweckend
aus.
Bei einer etwas härteren Bodenberührung hätte es mir das Fahrwerk
ausgerissen.
Abhilfe schaffte hier ein Blick in die „Grabbelkiste“. Ein Stück Alu
wurde so zurechtgeschliffen, dass es in das vordere Bereich passte.
Danach wurden die Bohrlöcher markiert, gebohrt und anschließend auf den Spannt geheftet.
Danach konnte ich durch die gebohrten Löcher im Alu die Befestigungslöcher im Holz bohren und das Gewinde für die M3 Schrauben schneiden.


Hier in einer vorläufigen Montage mit offen liegender Anlenkung wurden die noch freien Bereich mit Pappelsperrholz aufgefüttert, damit das Alu satt aufliegen kann. Ebenfalls noch auf den Schwimmern, damit die Montage leichter fällt und man die Hände frei zum Arbeiten hat.







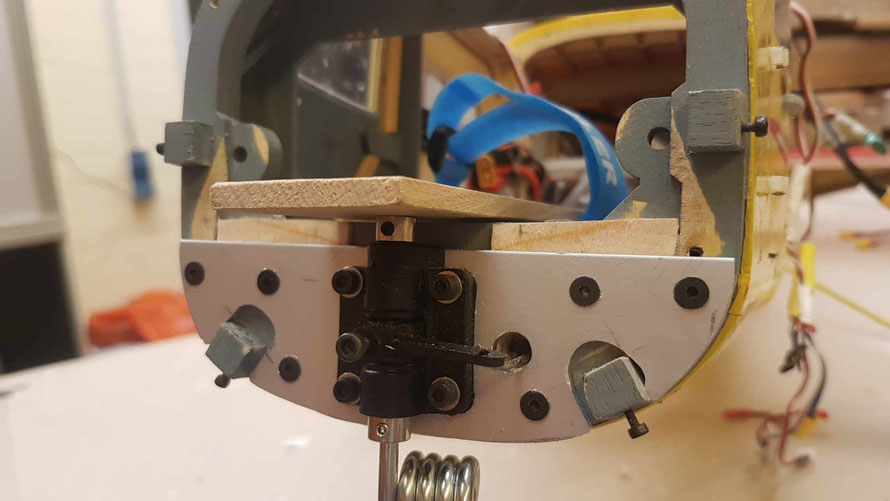
Und hier bereits das fertig montierte Alu-teil am vorderen Rumpfpannt.
Im Alu wurde für das Fahrwerk selber auch ein M3
Gewinde geschnitten, das bis in den Spannt reicht.
Das Loch rechts neben dem Fahrwerk dient zur Anlenkung des Bugrades und wird vom Seitenruder-Servo mitangesteuert.
Es lässt sich leicht in der Führung drehen da die Bohrung ein wenig aufgebohrt wurde, um die Leichtgängigkeit zu gewährleisten und das Servo nicht zu überlasten.
Für die Akkubefestigung habe ich mir eine Art „Rutsche“ überlegt.
In die bestehenden Löcher der Rumpfkonstruktion greift ein Haken aus Holz ein, den ich aus mehreren Lagen erstellt habe.
Er ist so
gestaltet, dass er mich leichten Druck nach unten in die Öffnung einrastet.
Die vordere Auflage bildet der Bugspannt, die hintere Auflage durch 2 Lagen des Buchenholz-Brettes.




Die Auflage
hinten ( Bereich zu den Servos) ist in den bestehenden schlitzförmigen Öffnungen der Rumpfkonstruktion montiert worden, die für die Akku-Schlaufen vorgesehen sind. Sie bieten einen besseren Halt
als das Verbohren im dünnen Holz.
Zum Herausnehmen
muss nur das Akku-Brett nach hinten gezogen werden.
Hier wird noch
auf der Unterseite ein 1mm Pappelholzstreifen angeklebt, damit ein Verrutschen nach hinten vermieden wird.
Durch die leichte Vorspannung hält das Akku-Brett von selber. Zwei seitliche 2,4mm Messingstifte halten das Brett in Position.
Nachdem nun sowohl das Hauptfahrwerk als auch das Bugfahrwerk fertig montiert wurde, ergab sich ein wesentlich besseres Bild.
Man sieht nun deutlich, dass der Rumpf satter am Boden liegt und dadurch eine bessere Optik entsteht. Ob ich jedoch Zwecks besseren Starteigenschaften die Nase leicht anheben
muss, wird sich beim Einfliegen ergeben.
Das Hauptfahrwerk hat nun auch noch seine Übergangsanformung zum Rumpf bekommen und gibt der TO ein besseres Aussehen.




Stütz-Akku:
Des Weiteren wurde nun auch das Innenleben und die RC-Technik der TO ein wenig aufgeräumt.
Die Stromversorgung derzeit erfolgte durch das BEC nur eines Drehzahlstellers.
Im Falle eines Akku-Ausfalls oder eines defekten Servos (man spricht hier auch von „Generatoreffekt“ durch eine Art von „Rückinduktion“ der Spannungsspitzen...), kann dies die
restliche Elektronik bzw. den Regler stören bzw. auch lahmlegen. Den Rest kann man sich ausmalen…
Einen ähnlichen Fall hatte ich bei einem meiner letzten Flüge mit meiner PA18, wo mir der Regler im Flug „abbrauchte“, ich eine Rauchfahne zog und glücklicherweise noch steuern
konnte. Daher entschloss ich mich für eine zusätzliche Spannungsquelle in Form eines Stütz-Akkus.
Es genügt allerdings nicht, diesen zweiten Akku einfach parallel zum BEC des bestehenden Drehzahlstellers anzuschließen, das wäre nicht ganz zu Ende
gedacht!
Bei einem Kurzschluss am BEC des Reglers wäre dann auch die Sekundärspannungsquelle kurzgeschlossen und umgekehrt.
Die beiden unterschiedlichen Spannungsquellen müssen daher „entkoppelt“ werden.
Technischer Ansatz:
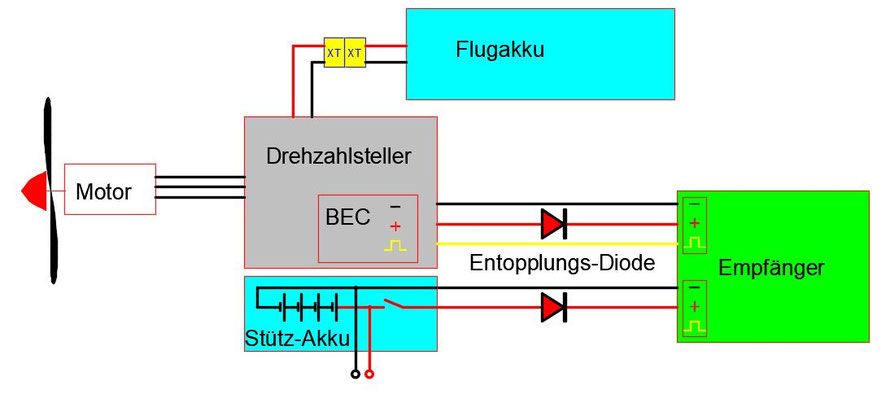
Egal ob mit einem oder zwei Motoren, sowohl in der Zuleitung vom Drehzahlsteller zum Empfänger als auch vom Stütz-Akku zum Empfänger werden Entkopplungs-Dioden in Stromrichtung verbaut.
Bei zwei Motoren bzw. zwei Drehzahlstellern gibt es dann eben in jeder BEC Leitung eine Diode.
Im oben gezeigten Fall könnte zBsp. der Schalter und der Ladeanschluss am Stütz-Akkus entfallen, wenn lediglich ein Stecker
vorhanden ist. Der Akku wird dann eben außerhalb des Modells geladen, was auch gewisse Vorteile bringt.
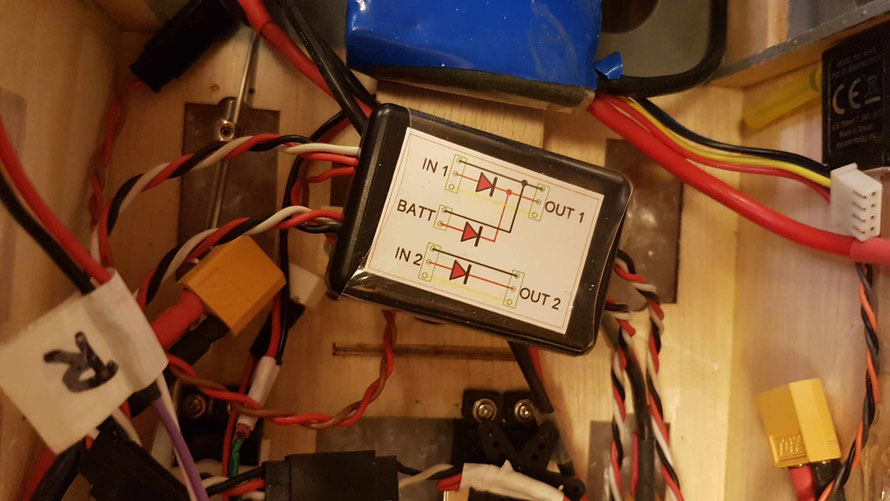
Für meine TO habe ich mir folgende Schaltung und Skizze angefertigt und sie in eine kleinen 1.-€ Box von „großen C“ untergebracht. Jede Entkopplungs-Diode kann mit 5A belastet werden.
Die gesamte „ Schaltung“ wird auf einer Lochraster-Platine gelötet, die Strombahnen werden verzinnt
Bei zwei Motoren wird das System um einen weiteren Drehzahlsteller ergänzt, der Stützakku bleibt wie gehabt.Hier kann man dann noch, wie in dem Layout vermerkt, zwei LED's mit unterschiedlichen Farben ( Blau, Rot)verbauen.
Fällt ein Steller aus, so bleibt zNspl. nur die rote LED aktiv.

Die beiden Eingänge IN1 und IN2 stellen die beiden Anschlusskabel der Drehzahlsteller
dar.
Die beiden Ausgänge AUT1 und OUT2 die Verbindung zum Empfänger.
Sollte nur ein Motor verwendet werden, dann ist nur IN1/OUT1 zu verwenden, da hier der
Stütz-Akku einspeist.
Verkabelt, mit dem Label eingeschrumpft aber noch nicht positioniert sieht es dann so aus:

Funktionsweise:
Betrieb mit einem Motor:
Sollte der Drehzahlsteller plötzlich versargen und einen Kurzschluss generieren, so wird dies durch die Entkopplung -Diode ab Eingang des Empfängers „geblockt“. Der Kurzschluss kommt nicht zum Empfänger.
Gleichzeitig wird permanent der Empfänger durch eine zweite Stromquelle gespeist, jedoch nicht geladen.
Sollte nun die Stromversorgung durch das BEC des einen Drehzahlstellers wegfallen, so liegt sofort die Akkuspannung der zweiten Stromquelle an und man kann zumindest kontrolliert, wenn auch ohne Motorunterstützung die Landung einleiten. Dies passiert unterbrechungsfrei.
Betrieb mit zwei Motoren:
Bei zwei Motoren speisen beide BEC der Drehzahlsteller den Empfänger, allerdings ohne sich gegeneinander zu speisen, da dies durch die Entkopplung -Diode verhindert wird.
Im Ausfall eines Drehzahlstellers passiert nichts, es entfällt nur der jeweils betreffende Motor für den Schub. In diesem Falle würde man sofort die Landung einleiten.
Erst beim Ausfall beider Drehzahlsteller würde die zweite Stromquelle aktiv werden und man verfährt wie bei einem Motor. Landung!
Funktions-Test:
Bevor all die Technik an ihren Platz positioniert wurde und die TO für den nächsten Flug ins Hochregal kam, wurde ein Test durchgeführt.
3S Akku an seinen Platz, Stütz-Akku an seinen Platz und beide Stromversorgungen eingesteckt.
Es erfolgte das obligatorische Pipe-Piep-Piep und die TO war „am Netz“. Sämtliche Funktionen wurden überprüft und funktionierten einwandfrei.
Nun wurde der 3S Akku abgeklemmt und siehe da: Sämtliche Ruder funktionierten ohne Unterbrechung und auch der Empfänger erzeugte beim Abstecken keinerlei
Fehlsignal.
Er registriere die Unterbrechung nicht. So soll es sein.
Die Schaltung funktioniert also und kann in dieser Form auch für andere Modelle verwendet werden.
Flug-Test...
An einem schönen, sonnigen und fast windstillen Tag im Juli war es dann soweit.
Alleine am Platz, das Modell wurde aufgebaut, alle Funktionen getestet, Schwerpunkt überprüft und los gin's.
Erst Anrollen und dann zügig Gas geben, bis sie leicht dahin-hüpfte und ein wenig Zug am Höhenruder...Das genügte und sie hob ab.
Keine Tendenz zum Ausbrechen oder Verderehen, wie man es bei einmotorigen Maschienen gewohnt wäre.
Sauber hob sie weg und mit ein paar Trimm-Klicks flog sie sauber geradeaus.
Auch die erste Landung mit Räder verlief unspektakulär.
Gegen den Wind ausrichten und sobald ich sicher war, der Platz bzw. den beginn des Platzes überflogen zu haben, nahm ich Gas etwas heraus und ließ sie kommen.
Mit ein wenig Höhenruder und Querruder-Korrektur setzte sie sich fast in meiner Höhe hin und rollte aus......Mehr wollte ich nicht.




